 Oleh : Fadlan Fadillah 41119120128
Oleh : Fadlan Fadillah 41119120128
Email : fadillahfadlan3@gmail.com
Sistem LIDAR merupakan perpaduan antara LRF (Laser Range Finder), POS (Positioning and Orientation System) yang diintegrasikan dengan DGPS (Differential Global Positioning System), IMU (Inertial Measurement Unit) dan Control Unit. Prinsip kerja sistem LIDAR secara umum adalah sensor memancarkan sinar laser ke target di permukaan bumi, kemudian sinar laser tersebut dipantulkan kembali ke sensor.
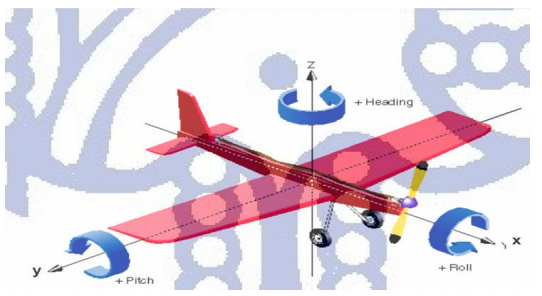
Berkas sinar yang kembali kemudian dianalisis untuk mengetahui jarak dari sensor ke posisi objek dan menghasilkan posisi 3 dimensi melalui data posisi dan orientasi dari sensor. Prinsip kerja sensor laser untuk pengukuran jarak sensor terhadap permukaan tanah menggunakan prinsip beda waktu atau dengan menghitung jarak berdasarkan informasi selang waktu yang dibutuhkan sinar laser menempuh perjalanan dari pemancar, hingga kembali ke receiver. Pada saat proses scanning sensor laser, diawali dari transmitter menembakkan laser, kemudian diarahkan oleh cermin yang bergerak sesuai dengan spesifikasi sudut yang ditentukan. Perpaduan kerja dari komponen sensor laser bisa memberikan data untuk mengetahui jarak dari sensor ke objek.Sistem penginderaan jauh ialah serangkaian komponen yang diguna-kan untuk penginderaaan jauh. Rangkaian komponennya berupa tenaga, objek, sensor, data, dan pengguna data (Sutanto, 1992). Salah satu komponen terpenting dari sistem penginderaan jauh adalah sensor. Tenaga yang datang dari objek di permukaan bumi diterima dan dire-kam oleh sensor. Kemampuan sensor untuk menyajikan gambaran objek terkecil ini disebut resolusi spasial. Semakin kecil objek yang dapat direkam oleh sensor menandakan semakin baik kualitas sensor terse-but. Lebih dari itu sensor yang terpasang pada wahana pesawat ataupun satelit akan menghasilkan data akuisisi yang mengandung bias apabila pergerakan wahana tidak diperhitungkan. Hal ini karena selama misi penerbangan, pesawat udara senantiasa berotasi pada tiga sumbunya, yaitu pitch, roll, dan heading. Pitch adalah gerakan rotasi sumbu (y) wahana terbang terhadap sumbu (Y) sistem referensi terbang. Roll merupakan pergerakan rotasi sumbu (x) wahana terbang terhadap sumbu (X) pada sistem referensi terbang. Heading merupakan sudut antara sumbu (z) wahana terbang terhadap arah utara. Pergerakan wahana pada salah satu sumbu akan menyebabkan sumbu yang lainnya tidak berimpit dengan sumbu referensi. Agar lebih memperjelas mengenai pergerakan wahana terbang, disajikan melalui gambar berikut.
Gambar
1. Visualisasi Tipe Pergerakan Wahana Terbang (Nawangsidi, 2009)
Apabila dicermati, walaupun sistem
penginderaan jauh bekerja secara bersama-sama untuk menghasilkan suatu
pengukuran, tetapi proses akuisisi data antara komponen sistem tidak bekerja
secara simultan pada waktu yang bersamaan. Hal ini akan berimplikasi pada hasil
yang diperoleh karena sistem yang bekerja tidak berada pada satu sumbu
pengamatan. Sebagai suatu contoh pada akuisisi data dengan menggunakan
teknologi LIDAR. Proses akuisisi data pada LIDAR memiliki komponen sistem yang
kompleks dan bekerjanya tidak secara simultan serta dipengaruhi oleh berbagai
bias. LIDAR merupakan perpaduan antara LRF (Laser Range Finder), POS
(Positioning and Rientation System) yang mengintegrasikan DGPS (Differential
Global Positioning System), IMU (Inertial Measurement Unit) dan Control Unit.
Representasi metode penginderaan jauh dengan LIDAR disajikan melalui gambar
berikut.

Gambar
2. Representasi Akuisisi Data Teknologi LIDAR (Anonim, 2012)
Memperhatikan gambar tersebut, dapat
dijelaskan bahwa antara GPS, IMU dan sensor laser tidak merekam data pada waktu
yang bersamaan. Sensor laser yang menempel pada pesawat senantiasa akan
mengalami perubahan posisi pengaruh dari pergerakan pesawat. Agar hasil
akuisisi data yang diperoleh bebas dari kesalahan, maka perlu dilakukan suatu
proses inte-grasi komponen dari sistem teknologi LIDAR. Integrasi dalam hal ini
dimaksudkan sebagai upaya untuk memadukan dan menghitung posisi unit perekam
pengukur jarak, sudut cermin penyiam, posisi GPS dan informasi IMU pada saat dilakukannya
proses akuisisi data. Proses integrasi sistem merupakan sesuatu yang perlu
menjadi kajian dalam penelitian. Sebagai bagian dari tinjauan mengenai
integrasi sistem teknologi LIDAR, maka melalui tulisan ini akan dicoba untuk
disajikan mengenai sistem kerja dari komponen teknologi LIDAR. Hal-hal yang
akan dibahas difokuskan pada kajian mengenai sensor laser. Melalui pemaparan
isi tulisan ini, diharapkan bisa memberikan suatu peran sebagai informasi awal
untuk kegiatan integrasi sistem penginderaan jauh khususnya teknologi LIDAR.
METODE Metode penulisan uang digunakan dalam penulisan karya ini yakni metode
kepustakaan. Data dikumpul-kan dari buku, artikel, dan rujukan yang relevan.
Data tersebut dikum-pulkan sebagai bahan analisis. Data dianalisis secara
deskriftif kualitatif.
PEMBAHASAN
Sistem LIDAR / Airborne Laser Scanning
Sistem LIDAR merupakan perpaduan
antara LRF (Laser Range Finder), POS (Positioning and Orientation System) yang
diintegrasikan dengan DGPS (Differential Global Positioning System), IMU
(Inertial Measurement Unit) dan Control Unit. Prinsip kerja sistem LIDAR secara
umum adalah sensor memancarkan sinar laser ke target di permukaan bumi,
kemudian sinar laser tersebut dipantulkan kembali ke sensor. Berkas sinar yang
kembali kemudian dianalisis untuk menge-tahui jarak dari sensor ke posisi objek
dan menghasilkan posisi 3 dimensi melalui data posisi dan orientasi dari sensor
(Lohani, 1996 dan Istarno, 2011). Pernyataan yang serupa juga menjelaskan,
bahwa LIDAR merupakan suatu metode pemetaan dengan teknologi baru yang
menggunakan sensor laser pada pesawat udara. Teknologi baru mempunyai makna
bahwa sensor lasernya diletakkan pada wahana yang bergerak. Sebelumnya laser
digunakan untuk pengukuran dengan objek dan sensor yang diam. Pada saat
akuisisi data, sensor laser memancarkan sinar laser dari wahana terbang ke arah
permukaan bumi dengan sudut pancaran tertentu. Apabila posisi wahana terbang
dapat diketahui dengan GPS dan INS, serta jarak antara wahana terbang dengan
permukaan bumi diketahui dengan sensor LIDAR, maka titik-titik di permukaan
bumi akan dapat dike-tahui posisinya (Pfeifer & Christian, 2007 dan
Sutanta, tt). Proses akuisisi data LIDAR dengan perolehan hasil yang terbebas
dari berbagai bias kesalahan dipandang sebagai sesuatu yang harus melakukan
berbagai tahapan koreksi. Perlu menjadi penekanan bahwa antara komponen pada
sistem LIDAR tidak beroperasi secara simultan pada waktu yang bersamaan.
Sehingga hasil akuisisi data yang diperoleh akan mengan-dung berbagai bias akibat
terjadinya pergerakan wahana terbang dan per-bedaan waktu akuisisi data. Bias
yang terjadi dapat berupa perbedaan spasial dan temporal dari masing-masing
komponen sistem LIDAR. Lebih jelasnya disajikan sebagai berikut. a. Deviasi
spasial Deviasi spasial adalah perbedaan posisi antara lokasi antena GPS dengan
lokasi laser scanner pada wahana terbang. Sebagai ilustrasinya disajikan
melalui gambar berikut.

Gambar
3. Deviasi spasial antara antenna GPS dengan sensor laser (Nawangsidi, 2009)
b. Deviasi temporal Dasar
pertimbangan adanya deviasi temporal karena komponen-komponen pada LIDAR yaitu
GPS, INS, dan sensor laser melakukan pengukuran tidak secara simultan pada
waktu yang bersamaan. Selisih waktu antara ketiga alat tersebut ketika
melakukan pengukuran dinyatakan sebagai deviasi tem-poral. Sebagai ilustrasi
me-ngenai deviasi temporal disa-jikan melalui gambar berikut.

Gambar
4. Deviasi temporal antara GPS, INS, dan sensor laser (Nawangsidi, 2009)
Upaya yang dapat dilakukan untuk
memberikan koreksi terhadap bias pada akuisisi data LIDAR dilakukan dengan cara
integrasi komponen sistem LIDAR. Integrasi menurut KBBI mempunyai makna suatu
gabungan untuk menjadi kesatuan yang utuh dan bulat. Penerapan integrasi
tentunya akan melibatkan lebih dari satu komponen pada suatu sistem. Sama
halnya dengan makna dari integrasi, pada sistem penginderaan jauh teknologi
LIDAR juga terdapat integrasi antara komponen sistem LIDAR. Komponen yang
dimaksud adalah sebagai berikut.
- GPS. GPS (Global Positioning
System) merupakan sistem radio navigasi dan penentuan posisi menggunakan
satelit. GPS didesain untuk memberikan posisi dan kecepatan tiga dimensi yang
teliti, dan juga informasi mengenai waktu secara kontinu di seluruh dunia.
Metode penentuan posisi dengan GPS pada proses akuisisi dengan LIDAR
menggunakan metode difer-rensial kinematik dengan menggunakan data fase.
Penggunaan metode diferensial akan memberikan hasil pengamatan yang lebih
teliti.
- IMU Untuk mendapatkan hasil
pengukuran yang optimal dengan tingkat kesalahan seminimum mungkin, maka pada
wahana udara dilengkapi alat untuk merekam posisi pesawat saat melakukan akuisi
data. Alat yang digunakan adalah IMU. IMU (Inertial Measurement Unit) akan
memonitor akselerasi dan rotasi pesawat.
- Sensor laser Sensor laser merupakan
alat yang digunakan untuk melakukan pengukuran jarak antara sensor terhadap
permukaan tanah dengan yang menggunakan prinsip beda waktu dan ada yang
menggunakan prinsip beda fase Tanpa terlepas dari pemaknaan mengenai integrasi,
sebagai informasi awal mengenai integrasi LIDAR merupakan suatu pertimbangan
penting mengenai bagaimana komponen dari sistem LIDAR ter-sebut bekerja. Salah
satu komponen LIDAR yang akan menjadi pene-kanan dalam pembahasan ini yaitu
mengenai sensor lasernya. Agar lebih mengarahkan pembahasan mengenai prinsip
kerja sensor laser, perlu merujuk pada karakteristik dari sistem teknologi
LIDAR. Karakteristik dari sistem teknologi LIDAR secara umum disajikan sebagai
berikut.

Lidar merupakan technology sensor radar dimana
sekarang ini banyak dimanfaatkan diberbagai bidang, salah satunya yaitu untuk
bidang pemetaan. Pemetaan menggunakan lidar biasa digunakan untuk pemetaan
topografi, situasi, dan inspeksi seperti inspeksi tower secara berkala.
Hasil output :
·
Raw data hasil pengukuran lidar.
·
Peta Situasi
·
Peta kontur hasil pengolahan
·
Pengukuran Kanopi
·
Inspeksi Tower
Bidang yang banyak memanfaatkan pemetaan
menggunakan lidar
·
Pertambangan
·
Perminyakan
·
Sipil
·
Kelistrikan
·
Perencanaan
Geoland Solutions melayani pemetaan LIDAR menggukan
pesawat tanpa awak ataupun dengan pesawat Udara. Untuk biaya silahkan baca jasa pemetaan lidar.
atau dapat berkonsultasi ke kantor Geoland Solutions
Kp.
Cihideung Ilir Kec. Ciampea Kab. Bogor
Fadillahfadlan3@gmail.com
Telp/WA: +62 813 1941 9941
Tidak ada komentar:
Posting Komentar